- Home
- Blog
- Embedded Systems
- Embedded C interview questions

Embedded C is the most popular language used in the development of electronic devices. Embedded software is associated with every electrical device's central processing unit. Embedded C code significantly impacts the speed with which a CPU completes a given task. Daily, we rely on our mobile phones, washing machines, digital cameras, etc., all of which are examples of technical devices. All of these gadgets rely on a microcontroller that was programmed in embedded C.
To understand all the concepts of Embedded C to crack the interview, we have listed frequently asked interview questions into three categories below. Check now.
Top 10 Embedded C Frequently Asked Questions
- What do you mean when you say "embedded system"?
- What is the C stack overflow error?
- What does "interrupt latency" mean to you?
- Can a variable in C be volatile and constant at the same time?
- What are some examples of embedded processors' Real-Time applications?
- What are some illustrations of embedded systems used in the automotive industry?
- What exactly do you mean by machine code?
- What does MIPS's entire name mean?
- What does the term "memory fragmentation" mean to you?
- What do Embedded C inline functions do?
Basic Embedded C Interview Questions And Answers
1. What do you mean by the terms "Embedded C language" and "Embedded C"?
A group of language modifications for the C programming language that the C Standards Committee has approved are known as embedded C. It is typically employed to address compatibility problems among C extensions for various embedded systems. In order to enable advanced microprocessor features like fixed-point arithmetic, several separate memory banks, and fundamental I/O operations, embedded C programming generally necessitates nonstandard additions to the C language.
| If you want to enrich your career and become a professional in Hardware Design , then enroll in hardware design development training. This course will help you to achieve excellence in this domain. |
2. What do you mean when you say "embedded system"?
A microprocessor-based computer and software system that is specifically created to carry out a single task is known as an embedded system. Either acting alone or as a component of a larger system, an embedded system.
3. What main distinctions exist between C and Embedded C?
C is a high-level programming language that can be used to make desktop programmes for any purpose. Embedded C, on the other hand, is a form of the C programming language that is used to make software for microcontrollers. "Embedded" in this case refers to the host computer or microcontroller, not the programming language.
4. Is embedded C a form of programming?
Not a fundamental programming language, embedded C. It is a C programming language extension used to create software for microcontrollers. The additions made to the standard C programming language in embedded C include fixed-point arithmetic operations, address space access, I/O Hardware Addressing, etc.
5. What are the benefits of Embedded C?
The expansion of the C programming language is called embedded C. Here are Embedded C's main benefits:
- Embedded C offers a quick coding speed since it is easy to learn and utilize.
- It doesn't require any hardware upgrades like more memory or storage space because it always does the same thing.
- It is singularly focused and does not multitask.
- Today, it is used by the vast majority of automatic apps available. Commercial use cases are a natural fit for embedded system applications.
6. What are the drawbacks of Embedded C?
- When we need to complete several activities at once, embedded C is not the best option because it only conducts one operation at a time.
- Only the hardware system is supported by embedded C. Therefore, you must alter the hardware if you need to change the programme.
- Because Embedded C has certain scalability concerns, it is difficult to scale it up in response to changes in scope or demand.
- There are various restrictions, such as memory restrictions or compatibility issues.
7. What does the Embedded C keyword volatile signify and how is it used?
Volatile is a type qualifier in embedded C that tells the compiler not to optimize the objects. The C standard says that the tumultuous type object can be changed in ways that the implementation doesn't know about. In other words, the value of an object marked as volatile can be changed at any time without having to change the code. Every time a programme calls on a volatile object, the compiler will reload the value from memory. Memory reading is the only way to confirm that the value has changed without reason.
8. The segment fault message in C is what? Which common sources of the segmentation fault error are there?
A segmentation fault error can happen during programme execution for a variety of reasons.
- The dereferenced pointer uses A segmentation fault error that could be produced if a pointer is used that does not necessarily point to a valid address or location in memory.
- If you try to enter a read-only memory location, the software can give you a rupture fault error message.
- When you attempt to release already-released memory (using a pointer), The occurrence of segmentation fault errors causes the occurrence of segmentation fault errors causing the generation of stack overflow errors in Overflow errors in C.
9.What is ISR's complete form in Embedded C?
Interrupt Service Routines, or ISR, is what it means in Embedded C. These are the programmes that are stored at certain addresses in memory and run when certain types of interrupts happen.
10. What is the C stack overflow error?
If a programme attempts to access memory past the maximum amount of available memory in C, a stack overrun error may result. For instance, if a pointer goes beyond the stack's maximum size, the stacking overflow error could happen (boundaries). When a stack overflowing error occurs, the application stops and no more instructions are carried out. Therefore, when employing the pointer and limit borders, we must exercise extreme caution. Stack overflow errors are produced as a result of segmentation fault errors.
Top Embedded c interview questions For Freshers
11. Is it possible to give any parameter to the ISR and have it return a value?
No. It is not able to move a parameter and have the ISR return a value. The ISR does not accept any parameters and does not return anything. When a software or hardware event takes place and the code doesn't really call an ISR, it is called instead. No parameters are therefore supplied into an ISR. There is no contact code to access the ISR's returned values because the code does not call the ISR. An ISR does not therefore return any value.
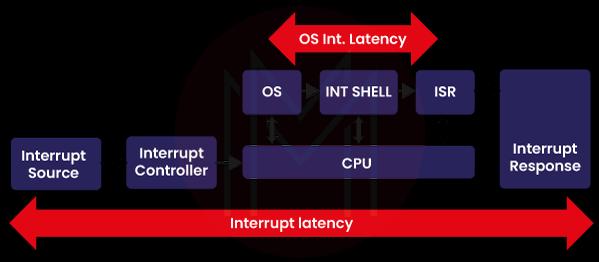
12. What does "interrupt latency" mean to you?
The amount of clock cycles that the processor needs to reply to an interruption request is known as the interrupt latency. This clock cycle counts the number of clock cycles between the assertions in the interrupt request and the first instruction in the interrupt handler.
13. How does Embedded C assess interrupt latency?
The oscilloscope can be used to measure the interruption latency in Embedded C. Observe the instructions below:
- Start by getting two GPIOs. Set up one GPIO to cause an interrupt and the other to switch. You can also connect an LED to the switching GPIO.
- Use the oscilloscope or analyzer to keep an eye on the PIN, which is set up to make the interrupt.
- Now, use the oscilloscope or analyzer to watch the second pin, which will change when the interrupt service function starts.
- When you make an interrupt, the signals on both GPIOs will change.
- Now, it's easy to figure out the time delay between the two signals or the interrupt latency of the instrument.
14. How can the interrupt delay be decreased?
In Embedded C, the interrupt latency can be decreased in a number of ways. Numerous factors affect the interrupt latency. Here is a list of a few of them:
- Controller for platforms and interrupts
- CPU frequency
- Timer occurrence
- Configuring the cache
- Software package, etc.
So, we can simply lower the interrupt latency by choosing the right platform and processor. We can also decrease the interrupt latency by shortening the ISR and avoiding calling a function inside of it.
15. A static variable in C is what? In C, why do we utilize static variables?
Static variables get the advantage of holding onto their value even when used outside their intended context. This implies that we can only initialize static variables once. Local in scope, yet lasting over the duration of the programme. The variable is kept around by the compiler until the end of the programme. Static variables may be defined either inside or outside of the function. Static variables have zero as their default value. Static variables continue to exist during programme execution.
Syntax: static datatype variable_name = value;
In most cases, a static constant is used to count an object. For instance, whenever a second account opens in the bank, the function openBakAccount() is called. Then, we can create a static variable in the method and increment it with each function run to keep track of the overall number of opened accounts.
16. How can you prevent an unintentional change to the pointer address from affecting a character pointer?
By mistakenly changing the pointer address, we can protect a character pointer by using the constant character pointer (const char*). With the string's pointer address, it avoids pointless modifications.
17. How can a variable that is specified in one source file be used in another?
A variable that may be accessed from another file can be declared with the "extern" keyboard shortcut. This is how a variable in one source file that is defined in that other source file might be used.
18. What does a function pointer mean to you?
A pointer that refers to a function rather than a variable is called a function pointer. A function pointer is entirely distinct from the class of many other pointers because of this. A function pointer saves the address of a certain function so that a programme can use it by calling the function.
19. Can a variable in C be volatile and constant at the same time?
Indeed, a C variable can serve as both a dynamic and a static one. It's possible to make use of both stable and dynamic variables at the same time. GPIO registers are accessed using a combination of volatile and const variables. If a switch or other output device is wired to GPIO in this way, the value of the port will be affected by "external factors." Important as it may seem, the volatile variable prevents the compiler from assuming anything and assures that the value is always read from the GPIO location.
20. In embedded C, what does a dangling pointer mean?
A pointer that directs the user to a memory address that has already been freed by the program and is no longer in use is known as a dangling pointer. Dangling pointers are initialized pointers that have been left hanging because the programmers occasionally forget to initialize them with a valid address. When an object is deleted or released from memory without changing the value of the pointer, this results in dangling pointers. A runtime error could occur if you attempt to describe the various dangling pointers.
Embedded c interview questions For experienced
21. How big are a C character pointer, integer, character pointer, and integer pointer?
For a 64-bit CPU, a size letter takes up 1 byte, an integer 4 bytes, an integer reference 4 bytes, and a character pointer 8 bytes.
22. What are some examples of embedded processors' Real-Time applications?
Embedded Processor real-time applications include the following:
- Dishwashers
- Autonomous passenger vehicles
- Mobile devices
- The television, medical gear, etc.

23. Which embedded systems for aerospace applications are some examples of?
Following are a few instances of embedded systems that can be used in aerospace applications:
- Systems that govern flight
- Autopilot setting
- A mechanism built in a passenger's seat
- Engine managers
- Controller for landing and departure, etc.
24. What do you mean when you say a reference is NULL? What is the use of it?
A macro named NULL is defined in C. A pointer that points nowhere useful is known as a null pointer. When we want to make sure that perhaps the pointer doesn't really point to every legitimate address and we don't want to use it to modify anything, we define the NULL pointer. We cannot determine whether this pointer refers to a legitimate address or not without using a null pointer.
25. In comparison to Count up loops, are Countdown to Zero Loops better?
Yes, countdown to zero loops were preferable to count up loops because the compiler can optimize the comparison to zero at loop termination. The majority of processors include instructions for zero comparison. As a result, they can simply remove the loop variable from the maximum value before comparing it to zero. Because of this, countdown to zero loops were preferable.
26. What are some illustrations of embedded systems used in the automotive industry?
Here are a few instances of embedded systems being used in automobile applications:
- Traffic management programmes
- Steering-by-wire and braking systems
- Cruise control software
- Methods for releasing airbags
- Engine control modules, etc.
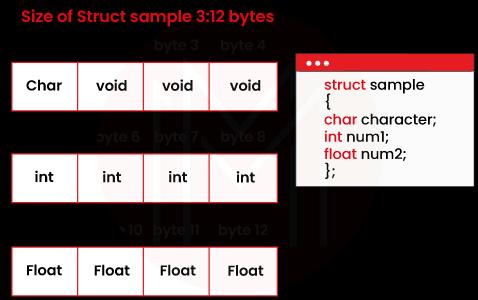
27. What does "structure padding" in Embedded C mean to you?
Structure padding is a concept utilized in the C programming language. The memory contents are brought into sync by inserting one or more zero bytes between the addresses. The compiler routinely checks to ensure that all of its parts are properly byte aligned.
28. What examples exist of medical devices that make use of embedded systems?
Here are a few examples of medical devices that make use of embedded systems:
- Methods for monitoring anesthesia
- ECG displays
- MRI machines
- Mechanisms for delivering drugs
- Ultrasound apparatus
29. What exactly do you mean by machine code?
The language of the computer, not the programmer, is called Machine Code. Machine language or object code is the only kind of instruction that a computer will accept. The code is complicated and prone to mistakes when a coder analyzes it. All software, whether written in languages like C, C++, or Java, must eventually be converted into machine code so that the computer can run it.
30. What is the relationship between machine cycle period and oscillator frequency?
As a general rule, the speed at which the application executes depends directly on the oscillator frequency. Therefore, in most circumstances, increasing the oscillator frequency will result in double the application speed.
31. What does MIPS's entire name mean?
Million Instructions Per Second is referred to as MIPS. It is a rough indicator of the unprocessed processing power of a computer. Because measurement methods frequently vary and because different computers may need various sets of instructions to do the same task, it could be misleading.
32. How can the performance of the 8051 microcontroller be improved?
Increasing the clock frequency is the simplest approach to make the 8051 microcontrollers work better. The original devices' 12MHz maximum clock speed restriction is greatly exceeded by the 8051 microcontrollers. The best technique to boost performance is to modify the microcontroller's internal architecture so that less oscillator cycles are needed to complete each machine instruction.
33. What does the term "memory fragmentation" mean to you?
Utilizing dynamic memory allocation causes a problem known as memory fragmentation. Our in-use variables are dispersed throughout the RAM as we repeatedly allocate and release memory spaces over time, resulting in non-contiguous free memory blocks. Memory fragmentation is the term for this. Failure of dynamic memory allocation may result from this. A runtime error results, for instance, if you need to allocate space for an array of 100 integers but there isn't a continuous block of memory that has that much room. Because of this, firmware for embedded devices never uses dynamic memory allocation.
34. What do Embedded C inline functions do?
With smaller definitions than other sorts of functions, inline functions can be substituted where their function call occurred. With the keyword __inline, ARM compilers enable inline functions. These procedures have a brief definition, and each time the inline function is called, the method body is used instead.
35. What kinds of memory are there in a C-based embedded system?
The types of memory used in an embedded device written in C are as follows:
- SRAM (Static RAM)
- DRAM (Dynamic RAM)
- Mask Reading-Only Memory (ROM)
- UV EPROM (UV Erasable Programmable Read-Only Memory)
- PROM (Programmable Read-Only Memory)
- EEPROM (Electrically - Erasable PROM)
Embedded C Interview Questions FAQ’s
1) Why embedded C is used in microcontrollers?
To improve the efficiency of the embedded system, C provides machine instructions that are optimized for the input. Since most high-level languages make use of libraries, they increase the amount of storage space needed, which is problematic for embedded devices.
2) Is embedded C hard?
Embedded C is not as hard as other languages, but it is not easy to read or change.
3) Is C used for embedded systems?
Although it was not initially intended for embedded software development, the C programming language supports a variety of programming methods, from high-level application code to direct manipulation of hardware registers. Consequently, C is now the most used programming language for embedded devices.
4) Which compiler is used for embedded C?
For Embedded C, a specific compiler is used that can make output for specific hardware/microcontrollers. Popular compiler to run a program written in the Embedded C language is the Keil compiler.
5) What is the data type in embedded C?
There are three different types of data for integers that can be used with embedded C: int, short, and long.
6) Where is embedded C used?
Embedded C is usually used to make applications for microcontrollers. C is a high-level language for programming. Embedded C is just a form of the C language that lets you add more features. This programming language works with any hardware.
7) What is startup code in embedded C?
The C startup code is used to set up things like global data variables and memory for data. It also sets a part of the data memory to 0 for variables that aren't set up yet when the programme loads.
8) Which are the keywords used in embedded C?
Developers use keywords to tell the programme where the pins are located. The programme uses standard keywords like bit, sbit, SFR, etc. to declare the bits and single pins. These keywords are already set up in the embedded C programme.
9) Are embedded C and embedded systems the same?
A microcontroller is used to manage and control the functions of each embedded system. Embedded C is an addition to the C programming language, making it easier to make embedded systems. In other words, it helps to code systems that use microcontrollers.
10) Why volatile is used in Embedded C?
When a variable is declared, the volatile keyword is added as a qualifier. It tells the compiler that the value of the variable could change at any time, even if the code it finds nearby doesn't do anything.
Embedded C Interview Tips:
- Please read the position's description and required qualifications very carefully. Know exactly what it is that the company is searching for in a candidate.
- Visit the website for more information about the company, its products, and its future goals.
- Get ready by demonstrating your competence, character, and experience with concrete examples.
- If you know someone who can help you out, have them help you practice Embedded C Interview questions by answering them.
- Decide what to wear by considering both comfort and appropriateness.
- See if there's a specific time and person you need to see.
- Make sure you know how to get to the interview place. Figure out how to get the interview location. Plan to get there 5 to 10 minutes before the interview starts.
| Related Article : Embedded Software Engineer Interview Questions. |
Conclusion:
Embedded C is the most popular language for making embedded systems because it is easy to use, works well, can be made quickly and works with other systems. To beat this embedded system interview competition, know all these embedded system interview questions and prepare well to ace the interview and land an embedded engineer job.
To prepare more, just enroll your names in Selenium with C training courses to improve the skills and knowledge required for an interview.
 On-Job Support Service
On-Job Support Service
Online Work Support for your on-job roles.

Our work-support plans provide precise options as per your project tasks. Whether you are a newbie or an experienced professional seeking assistance in completing project tasks, we are here with the following plans to meet your custom needs:
- Pay Per Hour
- Pay Per Week
- Monthly
| Name | Dates | |
|---|---|---|
| Hardware Design Development Training | Jul 28 to Aug 12 | View Details |
| Hardware Design Development Training | Aug 01 to Aug 16 | View Details |
| Hardware Design Development Training | Aug 04 to Aug 19 | View Details |
| Hardware Design Development Training | Aug 08 to Aug 23 | View Details |

Madhuri is a Senior Content Creator at MindMajix. She has written about a range of different topics on various technologies, which include, Splunk, Tensorflow, Selenium, and CEH. She spends most of her time researching on technology, and startups. Connect with her via LinkedIn and Twitter .


